Issue Number:BST-001
Decommissioning Process Common Issues
Investigation Subject Remote control technology
Needs
① Developing remote control technologies that are appropriate for work purposes and work environments by using a combination of basic and general-purpose technologies
Time Axis: Fuel Debris Retrieval [Short-Term]
Desired state and reasons for it
Fuel removal from the SFP, fuel debris retrieval, and dismantling of the PCV/RPV/buildings involves work under high radiation doses where workers cannot enter or work for a long time. In order to prevent or reduce exposure to workers, it is desirable to develop remote handling technologies and equipment such as robots.
In addition to the development of remote control technology, it is desirable to consider a combination of measures to reduce exposure, considering decontamination, shielding, and working hours.
There is a risk of not being able to meet the development schedule if one-off manufacturing is done according to the work purpose and work environment. Therefore, it is desirable to have a set of technologies that can be combined according to the purpose and environment.
Current state against ideal
The main remote technologies that have been developed so far for the 1F decommissioning are listed below. In the future, along with the improvement and advancement of these technologies, further utilization of remote technologies and development of new technologies are required in each operation for fuel debris retrieval from inside the reactor containment vessel/pressure vessel.
Examples of remote technologies developed to date
Objective 1: Reduction of work risks such as exposure (dose rate reduction through decontamination, etc.). Various types of work robots as follows:
Remote decontamination: floor decontamination, low area decontamination, medium area decontamination, high area decontamination, upper floor decontamination (water spray, high-pressure water, jet, brush, suction/blast, dry ice blast, etc.)
Remote shielding
Remote removal of source
Remote removal of interfering obstacles
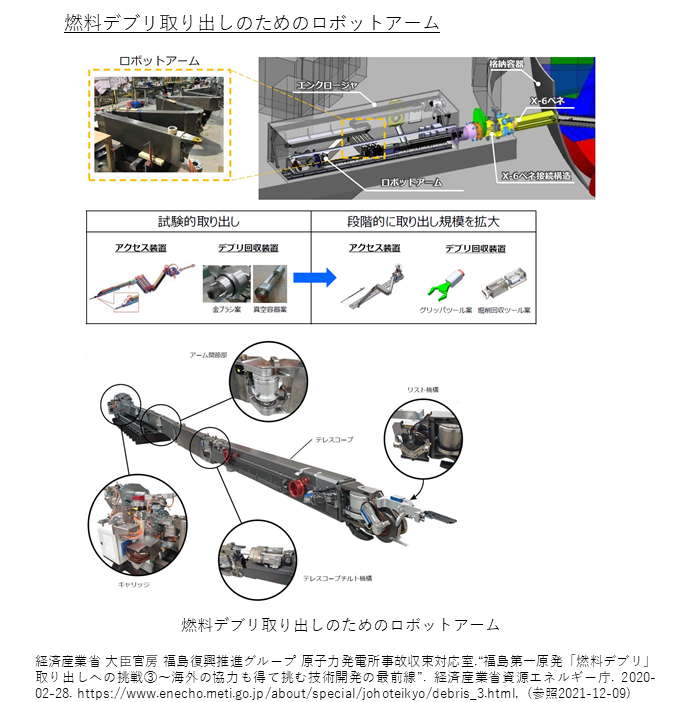
Robot arm for fuel debris retrieval
Objective 2: Survey inside the reactor building. Various types of survey robots as follows:
Remote survey of dose/source
Remote survey of interfering obstacles
RCV survey (in air, in water (ROV: Remotely Operated Vehicle))
Surveys of the upper and lower external surfaces of the suppression chamber
Water level measurement inside the suppression chamber
Torus chamber wall surface survey (underwater swimming and floor running)
Survey on the area around the vent piping
Acquisition of laser scan data
Remote collection of concrete core sample
Objective 3: Peripheral technologies to the above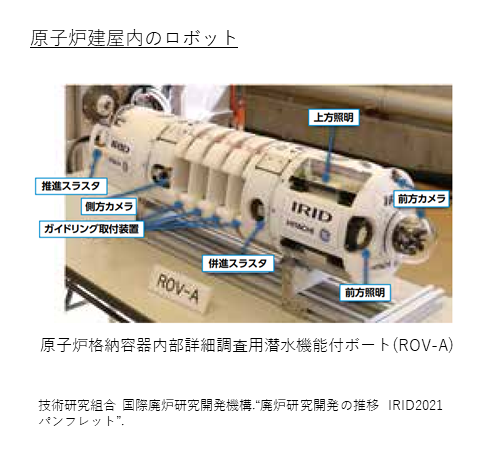
Robots to remove sediments from floor surfaces
Remote charging technology for various robots
Photographs and illustrations of these are shown below:
In March 2023, TEPCO Holdings, Inc. successfully conducted the first survey to enter the Unit 1 pedestal with a boat-type access research vehicle (underwater ROV) having a submersible function. As a result of the survey, a great deal of information was obtained, including the condition of sediments and fallen debris at the bottom of the pedestal, and the upper structures such as the control rod drive mechanism (CRD) housing.
TEPCO Holdings, Inc. has been modifying and verifying the control software and improving some devices related to the robot arm to be used in the experimental removal in the Unit 2 reactor and has been confirming the required functions. As preparatory work at the site, the installation of an isolation chamber was completed in April 2023.
It is essential that remote devices such as robot arm, etc. undergo sufficient performance verification and operational training by utilizing mock-ups that simulate the assumed internal environment of the PCV prior to on-site installation. It is necessary to verify the applicability of the remote equipment and the operation and maintainability of the remote system as a whole under severe environmental conditions that include many uncertainties. Operational training began in February 2022 at a simulated 1F facility in Naraha-machi, Fukushima Prefecture.
As a subsidy program under Government-led R&D Program on Decommissioning and Contaminated Water Management from FY2021, the development is underway for remote equipment maintenance technology, which is required including having a perspective such as recommendations, etc. on ensuring safe and reliable operation continuity over a long period of time, rational design of remote equipment and waste generation volume.
Issues to be resolved
It is necessary to have a perspective on the "combination" relationship (interface) between the part that performs the work, such as cutting equipment to retrieve debris, and the transportation equipment involved in transferring that part.
The retrieval of large amounts of debris and the dismantling of highly contaminated buildings require the establishment of a remote robot technology with a rigid structure and high resistance to failure, and a technological foundation that is different from the current frail and fragile general robot technology. It is required development of high radiation-resistant and shock-resistant remote control robots, cameras, and telecommunication technologies that can operate normally even under high radiation levels.
As the scale of debris retrieval is gradually expanded in the future, it is necessary to develop a “gripper tool” that can grab heavier objects and a “drilling and collection tool” that can crush debris and suck out pieces.
Since there are many narrow areas in the building, it is sometimes too narrow to place the remote controlling equipment inside for monitoring and valve operation. In addition, because of additional shielding installed, it is difficult to measure the dose in the back of the shielding. It is necessary to develop a technology that can pass through narrow areas such as the X-6 penetration.
It is desirable to be able to measure smear and dust on the floor and walls under high dose conditions. For smear, the issue is whether we can find appropriate smooth surfaces only by checking visual images and whether they can be rubbed with appropriate force.
It is desirable to be able to understand the robot's position and the dose there on a single real-time screen. For this purpose, it is desirable to have a common infrastructure in the telecommunication environment.
It is necessary to reduce radiation exposure during the maintenance of remote control equipment. It is important to have remote control equipment that requires less maintenance and is less likely to be exposed to radiation during maintenance.
It is also important to have a view of “improve operability”. Sufficient familiarity with the operation and functionality of the equipment is required in advance.
It is necessary to develop multiple technologies, such as wireless telecommunication infrastructure, cameras, and robots.
Active participation from outside the nuclear field is needed.
Relevant Issues
References
- BST-001 (PDF)
- Overall Diagram (HTML, PDF)
- Overall Diagram (Detailed Version) (PDF)
- Download all diagrams (diagram_en.zip, 9.4 MB)
- List of issues
Please note that this English text is a provisional translation of the Japanese original.