課題番号:共-1
廃炉プロセス共通項目
検討対象遠隔技術
ニーズ
※「望ましい状態とその理由」内のキーワードから福島原子力事故関連情報アーカイブへリンクしています(別ウィンドウで開きます)。キーワードでの検索となるため表示に時間がかかることがあります。
① 作業目的や作業環境に応じた適切な遠隔技術を基礎的・汎用的な技術の組合せでできるように開発したい
望ましい状態とその理由
使用済燃料プールからの燃料取り出し、燃料デブリ取り出し、PCV/RPV/建屋の解体等の分野においては、人が立ち入れない、または長く作業できない高線量下における作業を伴う。作業員被ばくを防止する、もしくは低減させるために、ロボット等の遠隔操作技術・機器の開発が望まれる。
作業目的や作業環境に応じて、ワンオフで製作する場合、開発スケジュールが間に合わない恐れがある。そのため、目的や環境に応じて組合せが可能な技術をそろえておくことが望ましい。
理想に対する現状
これまでに、1F廃炉のために開発された主な遠隔技術を以下に示す。今後は、これらの改良や高度化とともに、原子炉格納容器/圧力容器内などの燃料デブリ取出しに向けた各作業において、遠隔技術の更なる活用や新たな技術開発が求められている。
これまでに開発された遠隔技術の例
目的1:被ばくなどの作業リスクの低減(除染等による線量率低減)
以下に示す各種作業ロボット
以下に示す各種作業ロボット
遠隔除染:床面除染、低所除染、中所除染、高所除染、上部階除染(散水、高圧水、ジェット、ブラシ、吸引・ブラスト、ドライアイスブラスト等)
遠隔遮蔽
遠隔線源撤去
遠隔干渉物等撤去
燃料デブリ取り出しのためのロボットアーム
目的2:原子炉建屋内の調査
以下に示す各種調査ロボット
以下に示す各種調査ロボット
遠隔線量・線源調査
遠隔干渉物調査
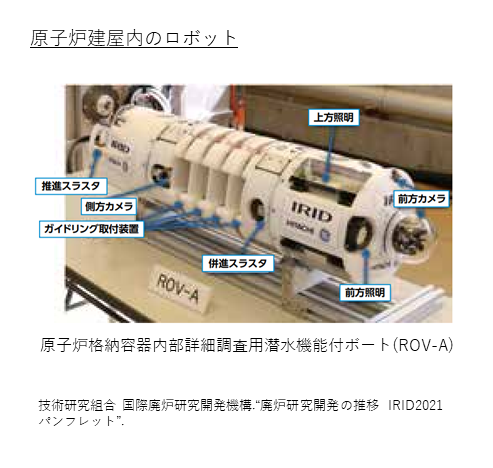
原子炉格納容器調査(空気中、水中(ROV: Remotely Operated Vehicle))
サプレッションチェンバー上部/下部外面調査
サプレッションチェンバー内水位測定
トーラス室壁面調査(水中遊泳や床面走行)
ベント管周辺部調査
レーザースキャンデータ取得
遠隔コンクリートコアサンプル採取
目的3:上記の周辺技術

床表面の堆積物除去ロボット
各種ロボットの遠隔充電技術
これらの写真やイラストを以下に示す。東京電力ホールディングスは2023年3月に1号機ペデスタル内に潜水機能付きボート型アクセス調査装置(水中ROV)を進入させる調査に初めて成功した。調査の結果、ペデスタル内底部の堆積物や落下物の状態、制御棒駆動機構(CRD)ハウジング等の上部の構造物の状態等、多くの情報が得られた。
東京電力ホールディングスは2号機の試験的取り出しで用いるロボットアームに係る制御ソフトの改修・検証・一部装置の改良等を実施し、要求機能の確認を進めている。現場での準備工事として、隔離部屋の設置が2023年4月に完了した。
ロボットアーム等の遠隔装置は、現場に設置する前に想定するPCV の内部環境を模擬したモックアップを活用し、性能検証、操作訓練を十分に行うことが不可欠である。不確定要素を多分に含む過酷環境条件下に対して、遠隔装置の適用性や遠隔システム全体の運用・保守性を検証する必要がある。2022年2月から、福島県楢葉町にある1Fの模擬施設で操作訓練を開始している。
2021年度から廃炉・汚染水対策事業の補助事業として、長期にわたる安全で確実な運転継続性の確保と遠隔装置の合理的な設計及び廃棄物発生量の提言等の観点も含めて必要となる、遠隔装置保守技術の開発を行っている。
解決すべき課題
デブリを取り出す切削機器等の作業を行う部分と、その部分の移動に関わるトランスポーテイション機器の「組合せ」の関係(インターフェース)への視点が必要である。
多量のデブリ取り出しや高汚染建屋の解体には、剛構造で故障に強い遠隔ロボット技術の構築が必要であり、現状の華奢で壊れやすい一般的なロボット技術とは異なる技術基盤の構築が求められる。高放射線量下でも正常に動作する耐放射線性や耐衝撃性の高い遠隔操作ロボットやカメラ、遠隔通信技術の開発が求められる。
今後、段階的にデブリ取り出しの規模を拡大していく中では、もう少し重いものをつかむことができる「グリッパツール」や、デブリをくだいて欠片を吸う「掘削回収ツール」などを開発する必要がある。
建屋内は狭隘部が多く存在するため、監視やバルブ操作を行うとしても、狭くて入らないことがある。加えて遮蔽体が追加設置されており、その奥の線量を測定することも大変である。X-6ペネトレーション等の狭隘部を通過できる技術の開発が必要である。
高線量下における床面や壁のスミア及びダストを測定できることが望ましい。スミアに関しては、適切な平滑面を画像だけで発見できるかどうか、適切な力でこすれるかどうか、という点が課題として挙げられる。
ロボットの位置情報及びそこでの線量を、リアルタイムで図面上に1つの画面として把握できると良い。そのためには、通信環境の共通インフラ整備も望まれる。
遠隔装置のメンテナンスによる被ばく量を低減する必要がある。メンテナンスが少なくて済む遠隔装置、メンテナンス時に被ばくしにくい遠隔装置とすることが重要である。
「操作性の向上」という観点も重要である。事前に設備の操作・機能性の十分な習熟が求められる。
無線の通信インフラ、カメラ、ロボット等の複数技術の開発が必要である。
原子力分野以外からの積極的な参加が必要である。
参考文献
(参考)関連する研究課題
実施されている研究課題
H29年度英知可搬型加速器X線源・中性子源によるその場燃料デブリ元素分析および地球統計学手法を用いた迅速な燃料デブリ性状分布の推定手法の開発
廃炉・汚染水対策事業燃料デブリ・炉内構造物の取り出しに向けた技術の開発(燃料デブリのダスト集塵システムの技術開発)
R2年度英知無人航走体を用いた燃料デブリサンプルリターン技術の研究開発
廃炉・汚染水対策事業原子炉圧力容器内部調査技術の開発
廃炉・汚染水対策事業燃料デブリ・炉内構造物の取り出し規模の更なる拡大に向けた技術の開発(環境改善・干渉物撤去のための遠隔技術の開発)
廃炉・汚染水対策事業原子炉格納容器内部詳細調査技術の開発
廃炉・汚染水対策事業遠隔装置保守技術の開発
H27年度英知廃炉に関する基盤研究を通じた創造的人材育成プログラム-高専間ネットワークを活用した福島からの学際的なチャレンジ-
R3年度英知燃料デブリ取り出しのための機械式マニピュレータのナビゲーションおよび制御
R3年度英知連携計測による線源探査ロボットシステムの開発研究
検討されている研究課題
特になし